
11 марта 2026 года состоялось заседание Объединенного ученого совета Российской Академии Транспорта (РАТ). Ключевой темой стал доклад «Научно-прикладные вопросы развития технологий автономного управления на всех видах транспорта». С основным докладом выступил Павел Александрович Попов, заместитель директора Передовой инженерной школы «Академия ВСМ» РУТ (МИИТ).
В ходе заседания Объединенного ученого совета РАТ Павел Александрович Попов акцентировал внимание на важности синхронизации отраслевых разработок с государственным курсом. Были представлены ключевые поручения Президента РФ по итогам совещания по вопросам развития автономных систем, состоявшегося 16 января 2026 года.
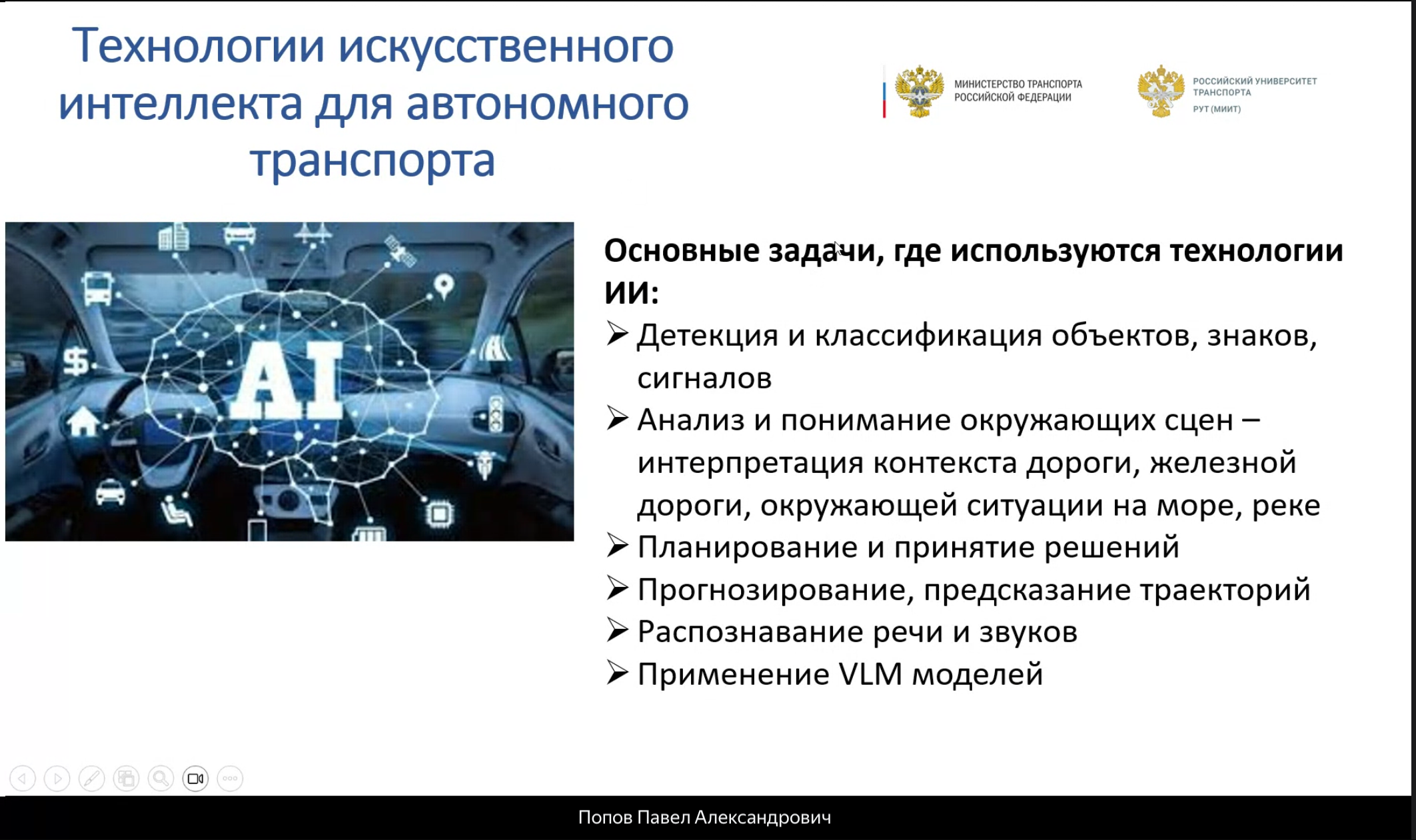
Докладчик подчеркнул, что автономный транспорт сегодня опирается на сложнейшие алгоритмы искусственного интеллекта (ИИ), выполняющие критически важные функции для обеспечения безопасности и эффективности движения.
Как отметил Павел Александрович, именно развитие этих технологий позволяет беспилотным системам эволюционировать от простых помощников водителя к полноценным автономным агентам, способным работать в непредсказуемых условиях реальной транспортной среды.
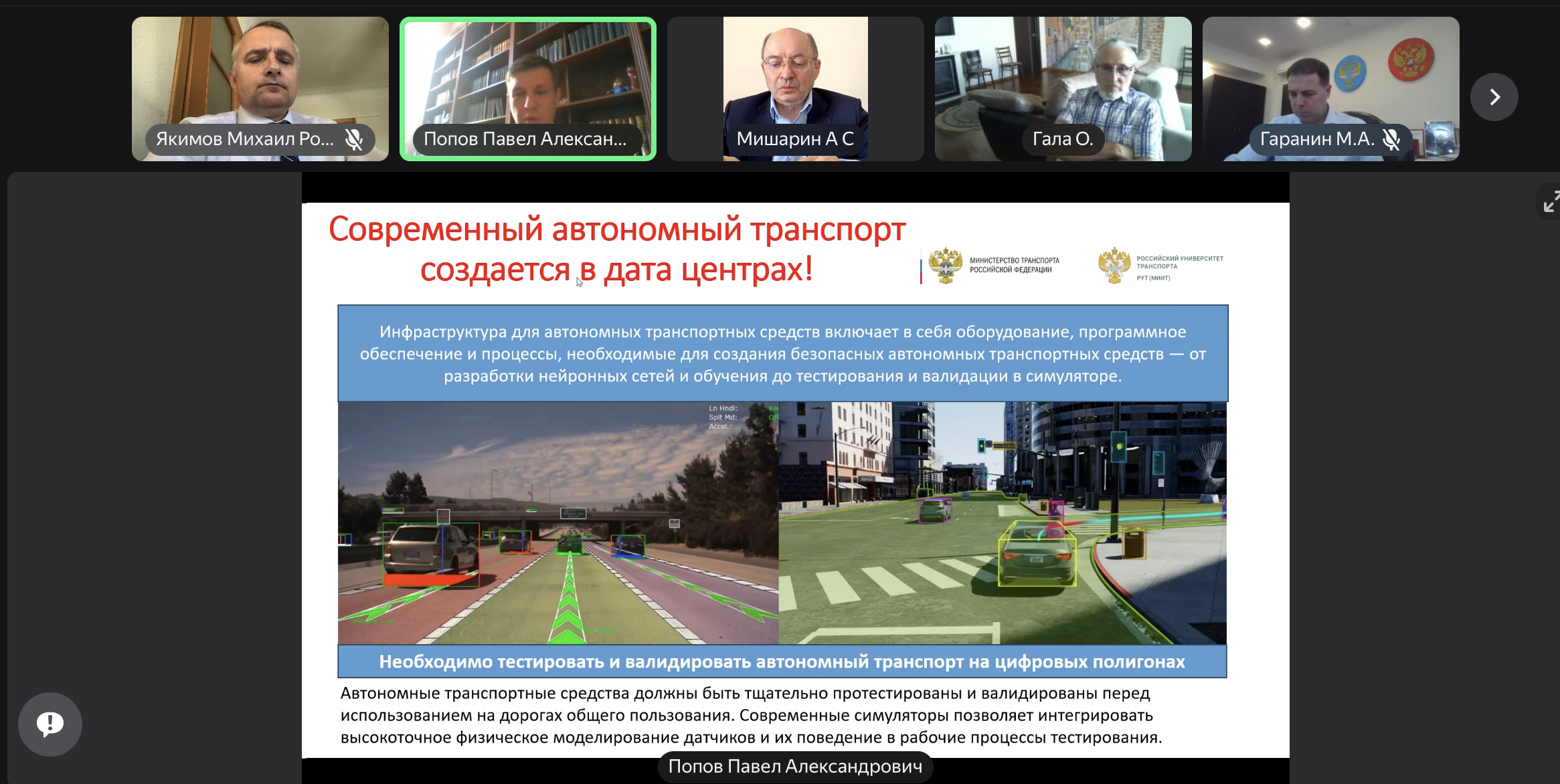
Важнейшим тезисом доклада Павла Александровича стала мысль о том, что современный автономный транспорт создается в дата-центрах. Разработка безопасных беспилотных систем не ограничивается «железом» самих машин — она невозможна без мощной вычислительной инфраструктуры, обеспечивающей полный цикл разработки: от обучения нейронных сетей до их отладки.
Заведующий лабораторией качества технологий искусственного интеллекта ВИНИТИ РАН, специалист Технического комитета по стандартизации № 164 «Искусственный интеллект» Майя Млякова рассказала о ключевых особенностях технологий искусственного интеллекта (ИИ), базирующихся на машинном обучении.
Система может эффективно решать сложные интеллектуальные задачи (как управление автомобилем), обладая при этом высокой гибкостью, но в то же время оставаясь «непрозрачной» и не гарантируя 100% точности или предсказуемости своих действий.

Борис Иванов из компании Navio выступил с докладом о развитии автономных технологий для беспилотных грузовиков. Иванов рассказал о концепции обучения и валидации беспилотных транспортных средств (ВАТС).
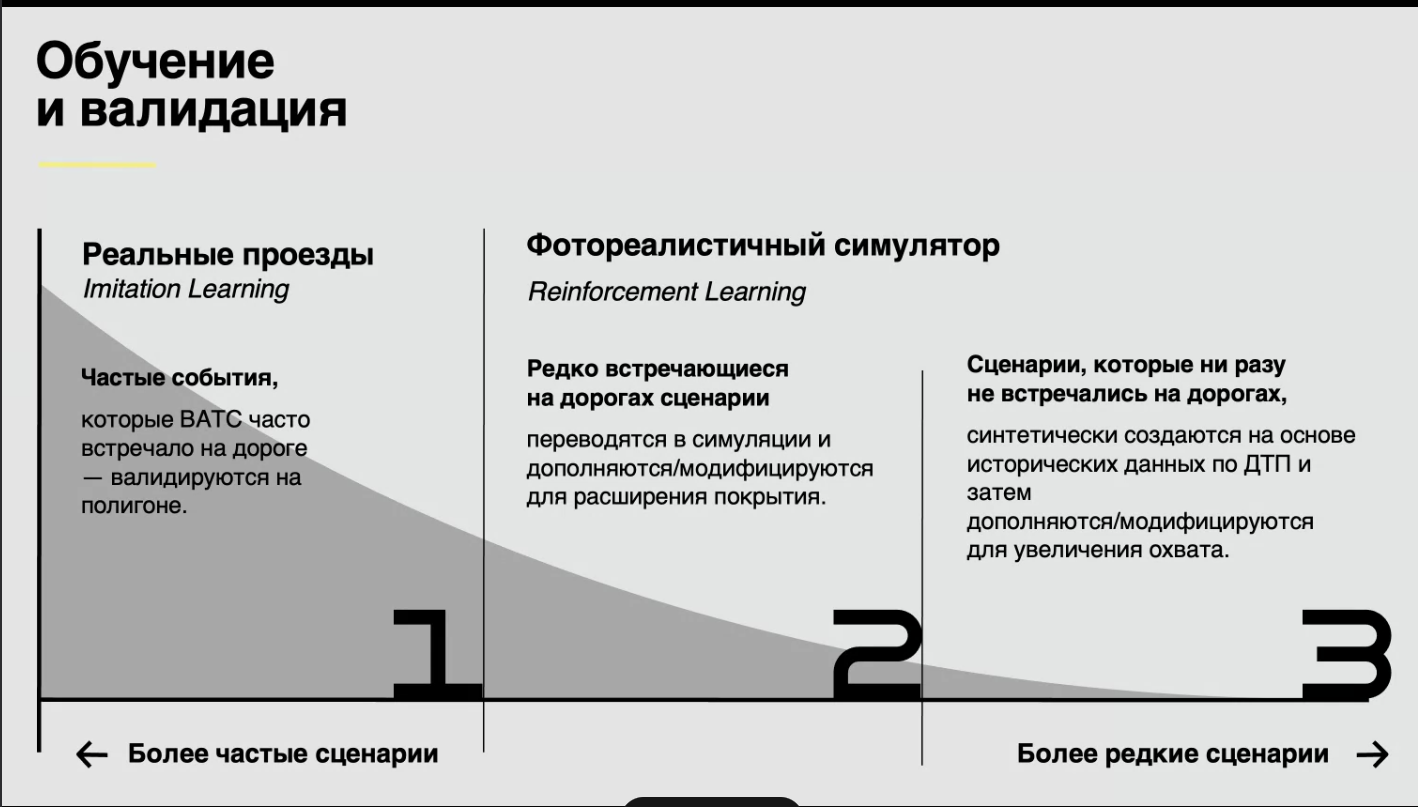
График наглядно демонстрирует переход от «эмпирического» подхода (обучение на реальном опыте вождения, что эффективно для обычных ситуаций) к «аналитическо-симуляционному» подходу (использование технологий для подготовки к редким и опасным событиям). Это позволяет разработчикам закрывать «слепые зоны» системы, не подвергая риску реальные автомобили и людей на дорогах.
Представители НАМИ выступили с докладом на тему: «Методы испытаний и основы сертификации ВАТС». Было подробно рассказано о работе системы технического зрения (Computer Vision) для беспилотного транспорта.

Александр Шевляков представил доклад о цифровой платформе, целью которой является кардинальное изменение подходов к контролю качества в дорожном строительстве. Платформа обеспечивает сквозное управление всем циклом — от производства асфальтобетона до его укладки, автоматически собирая и передавая данные от высокоавтоматизированной техники.
Первый этап (реализован в сентябре 2025 года) и включает в себя:
- Контроль календарного графика выполнения работ.
- Фиксация технологических нарушений с отображением статистики.
- Мониторинг работы техники с фиксацией ключевых параметров производительности.
- Аналитический дашборд для руководителей с ключевыми показателями для оперативного принятия решений.
- Модуль управления объектами строительства (мероприятиями) — создание, поиск, планирование работ на участке.
Второй этап (2025 год):
- Построение целостной защищенной системы с визуализацией процессов на интерактивной карте.
- Обеспечение информационной безопасности: строгая идентификация пользователей и ролевая модель управления доступом.
- Развитие геоинформационной подсистемы:
- Визуализация пространственных данных на электронной карте.
- Создание графической основы (цифровой геометрии дорог) для работы с данными дорожной сети, в том числе за счет импорта из внешних систем (например, ЦКДФ).
Александр Николаевич выделил ключевые преимущества платформы:
- Повышение качества. Контроль температуры смеси в реальном времени, исключающий укладку остывшего или перегретого асфальта. Датчики фиксируют параметры укладки.
- Оптимизация логистики.
- Создание полного цифрового досье (цифрового двойника) для каждого участка дороги. Система автоматически формирует исполнительную документацию, привязывая все данные (температура, плотность) к точным координатам.
- Усиление контроля. Руководитель или заказчик может в реальном времени наблюдать за ходом работ с любого объекта, отслеживая ключевые технические параметры.
- Снижение нарушений и бумажной работы. Подтверждение качества работ переводится в цифровой формат, обеспечивая позиционирование и точность расчетов.
Внедрение платформы позволит перейти от эпизодического контроля к сквозной, автоматизированной системе управления строительством в реальном времени. Это меняет подход: вместо поиска дефектов постфактум, мы предотвращаем их возникновение. В результате достигается значительная экономия бюджетных средств за счет увеличения межремонтных сроков службы покрытия, — заключил докладчик.
Президент Российской академии транспорта, д.т.н. Александр Сергеевич Мишарин в своем выступлении сделал акцент на необходимости системного, а не фрагментарного подхода к внедрению автономного транспорта.
 Президент Российской академии транспорта, председатель совета директоров холдинга «Синара – транспортные машины», д.т.н. Мишарин Александр Сергеевич:
Президент Российской академии транспорта, председатель совета директоров холдинга «Синара – транспортные машины», д.т.н. Мишарин Александр Сергеевич:
Сегодня все системы для автомобилей разрабатываются в условиях хаоса, как я это называю, то есть в условиях непредсказуемых дорожных ситуаций. Поэтому, на мой взгляд, проблему можно решать постепенно. Я знаю, что существуют дороги, где всё достаточно регламентировано. У нас есть платные автомобильные дороги, которые также во многом формализованы и регламентированы. В них вложены огромные средства. И почему бы сегодня не сформулировать чёткие требования к инфраструктуре и требования к автомобилю? Или к подвижному составу — возможно, это будет не просто автомобиль, а иное движущееся средство, которое при определённом оснащении и соответствующей инфраструктуре сможет двигаться в беспилотном режиме.
Давайте разберём принципиально. Это, по сути, и есть ответ на вопрос о том, каким должно быть оборудование спецтранспорта с мигалками, который движется не по общим правилам. Ведь если все будут двигаться строго по правилам, возникнет третья проблема. У нас вкладываются огромные средства в организацию уличной дорожной сети в городах. Уже сегодня существуют требования к инфраструктуре, позволяющей организовать беспилотное движение. Я говорю, к примеру, о движении по выделенным полосам для пассажирского транспорта общего пользования.
Это колоссальная задача. Сейчас комиссия Госсовета по транспорту приводит цифру: общественный транспорт перевозит 11 миллиардов пассажиров в год. От 80 до 90 процентов поездок в городах с населением свыше 50 тысяч человек осуществляется транспортом общего пользования. Я задаюсь вопросом: для кого вообще создаётся уличная дорожная сеть? Нужно ли делать выделенные полосы для общественного транспорта или для личных автомобилей? Этот вопрос уже назрел. При этом исследования показывают, что вероятность травматизма пассажиров в троллейбусе в 40 раз ниже, чем в личном автомобиле. А что на трамвае? Это серьёзная социальная задача, и она технологически решаема.
Если ты движешься по выделенной полосе, то отклониться некуда. Недавно подвели итоги по штрафам: за нарушение ПДД собирается 160 миллиардов в год. Это колоссальная сумма, и она продолжает расти. Мне кажется, мы каждый раз возвращаемся к этому обсуждению, и вопрос уже созрел. То есть необходимо рассматривать организацию беспилотного движения как систему.
Дальше можно двигаться в этом направлении: вырабатывать подходы, критерии, условия. Но это движение. Нельзя, на мой взгляд, все средства обнаружения вкладывать только в автомобиль. Он станет чрезмерно сложным и дорогим, это нереально. Государство может один раз вложиться в инфраструктуру и максимально упростить системы управления на подвижном составе.
Третий вопрос. Я абсолютно согласен: если мы не сформируем единый банк данных для организации дорожного движения — для всех видов транспорта, для всей мобильности, — то не сможем двигаться дальше. Ведь человек — главный нарушитель и источник хаоса. Решение этой задачи потребует огромных затрат энергии и ресурсов.
Читать далее:
Заседание Объединенного ученого совета Российской Академии Транспорта от 25.09.2025